Upsampling and Image Segmentation with Tensorflow and TF-Slim
A post showing how to perform Upsampling and Image Segmentation with a recently released TF-Slim library and pretrained models.
Introduction
In the previous post, we saw how to do Image Classification by performing crop of the central part of an image and making an inference using one of the standart classification models. After that, we saw how to perform the network inference on the whole image by changing the network to fully convolutional one. This approach gave us a downsampled prediction map for the image – that happened due to the fact that max-pooling layers are used in the network architecture. This prediction map can be treated as an efficient way to make an inference of the network for the whole image. You can also think about it as a way to make Image Segmentation, but it is not an actual Segmentation, because the standart network models were trained to perform Classification. To make it perform an actual Segmentation, we will have to train it on Segmentation dataset in a special way like in the paper Fully convolutional networks for semantic segmentation by Long et al. Two of the most popular general Segmentation datasets are: Microsoft COCO and PASCAL VOC.
In this post, we will perform image upsampling to get the prediction map that is of the same size as an input image. We will do this using transposed convolution (also known as deconvolution). It is recommended not to use the deconvolution name for this operation as it can be confused with another operation and it does not represent accurately the actual process that is being performed. The most accurate name for the kind of operation that we will perform in this post is fractionally strided convolution. We will cover a small part of theory necessary for understanding and some resources will be cited.
One question might be raised up now: Why do we need to perform upsampling using fractionally strided convolution? Why can’t we just use some library to do this for us? The answer is: we need to do this because we need to define the upsampling operation as a layer in the network. And why do we need it as a layer? Because we will have to perform training where the image and respective Segmentation groundtruth will be given to us – and we will have to perform training using backpropagation. As it is known , each layer in the network has to be able to perform three operations: forward propagation, backward propagation and update which performs updates to the weights of the layer during training. By doing the upsampling with transposed convolution we will have all of these operations defined and we will be able to perform training.
By the end of the post, we will implement the upsampling and will make sure it is correct by comparing it to the implementation of the scikit-image library. To be more specific we will have FCN-32 Segmentation network implemented which is described in the paper Fully convolutional networks for semantic segmentation. To perform the training, the loss function has to be defined and training dataset provided.
The blog post is created using jupyter notebook. After each chunk of a code you can see the result of its evaluation. You can also get the notebook file from here.
Setup
To be able to run the provided code, follow the previous post and run the following command to run the code on the first GPU and specify the folder with downloaded classification models:
from __future__ import division
import sys
import os
import numpy as np
from matplotlib import pyplot as plt
os.environ["CUDA_VISIBLE_DEVICES"] = '0'
sys.path.append("/home/dpakhom1/workspace/models/slim")
# A place where you have downloaded a network checkpoint -- look at the previous post
checkpoints_dir = '/home/dpakhom1/checkpoints'
sys.path.append("/home/dpakhom1/workspace/models/slim")
Image Upsampling
Image Upsampling is a specific case of Resampling. According to a definition, provided in this article about Resampling:
The idea behind resampling is to reconstruct the continuous signal from the original sampled signal and resample it again using more samples (which is called interpolation or upsampling) or fewer samples (which is called decimation or downsampling)
In other words, we can approximate the continious signal from the points that we have and sample new ones from the reconstructed signal. So, to be more specific, in our case, we have downsampled prediction map – these are points from which we want to reconstruct original signal. And if we are able to approximate original signal, we can sample more points and, therefore, perform upsampling.
We say “to approximate” here because the continious signal will most probably not be reconstructed perfectly. Under a certain ideal conditions, the signal can be perfectly reconstructed though. There is a Nyquist–Shannon sampling theorem that states that the signal can be ideally reconstructed if x(t) contains no sinusoidal component at exactly frequency B, or that B must be strictly less than one half the sample rate. Basically, the sampling frequency should be bigger by the factor of two than the biggest frequency that input signal contains.
But what is the exact equation to get this reconstruction? Taking the equation from this source:
s(x) = sum_n s(nT) * sinc((x-nT)/T), with sinc(x) = sin(pix)/(pix) for x!=0, and = 1 for x=0
with fs = 1/T the sampling rate, s(n*T) the samples of s(x) and sinc(x) the resampling kernel.
Wikipedia article has a great explanation of the equation:
A mathematically ideal way to interpolate the sequence involves the use of sinc functions. Each sample in the sequence is replaced by a sinc function, centered on the time axis at the original location of the sample, nT, with the amplitude of the sinc function scaled to the sample value, x[n]. Subsequently, the sinc functions are summed into a continuous function. A mathematically equivalent method is to convolve one sinc function with a series of Dirac delta pulses, weighted by the sample values. Neither method is numerically practical. Instead, some type of approximation of the sinc functions, finite in length, is used. The imperfections attributable to the approximation are known as interpolation error.
So, we can see that the continious signal is reconstructed by placing the resampling kernel function at each point that we have and summing up everything (this explanation omits some details for simplicity). It should be stated here that the resampling kernel shouldn’t necessary be sinc function. For example, the bilinear resampling kernel can be useв. You can find more examples here. Also, one important point from the explanation above is that mathematically equivalent way is to convolve the kernel function with series of Dirac delta pulses, weighted by the sample values. These two equavalent ways to perform reconstruction are important as they will make understanding of how transposed convolution work and that each transposed convolution has an equivalent convolution.
Let’s perform image upsampling using built-in function from scikit-image library. We will need this to validate if our implementation of bilinear upsampling is correct later in the post. This is exactly how the implementation of bilinear upsampling was validated before being merged. Part of the code in the post was taken from there. Below we will perform the upsampling with factor 3 meaning that an output size will be three times bigger than an input.
%matplotlib inline
from numpy import ogrid, repeat, newaxis
from skimage import io
# Generate image that will be used for test upsampling
# Number of channels is 3 -- we also treat the number of
# samples like the number of classes, because later on
# that will be used to upsample predictions from the network
imsize = 3
x, y = ogrid[:imsize, :imsize]
img = repeat((x + y)[..., newaxis], 3, 2) / float(imsize + imsize)
io.imshow(img, interpolation='none')
<matplotlib.image.AxesImage at 0x7fe530704050>
import skimage.transform
def upsample_skimage(factor, input_img):
# Pad with 0 values, similar to how Tensorflow does it.
# Order=1 is bilinear upsampling
return skimage.transform.rescale(input_img,
factor,
mode='constant',
cval=0,
order=1)
upsampled_img_skimage = upsample_skimage(factor=3, input_img=img)
io.imshow(upsampled_img_skimage, interpolation='none')
<matplotlib.image.AxesImage at 0x7fe528c4f9d0>
Transposed convolution
In the paper by Long et al. it was stated that upsampling can be performed using fractionally strided convolution (transposed convolution). But first it is necessary to understand how transposed convolution works.To understand that, we should look at a usual convolution and see that it convolves the image and depending on the parameters (stride, kernel size, padding) reduces the input image. What if we would be able to perform an operation that goes in the opposite direction – from small input to the bigger one while preserving the connectivity pattern. Here is an illustration:

Convolution is a linear operation and, therefore, it can be represented as a matrix multiplication. To achieve the result described above, we only need to traspose the matrix that defines a particular convolution. The resulted operation is no longer a convolution, but it can still be represented as a convolution, which won’t be as efficient as transposing a convolution. To get more information about the equivalence and transposed convolution in general we refer reader to this paper and this guide.
So, if we define a bilinear upsampling kernel and perform fractionally strided convolution on the image, we will get an upsampled output, which will be defined as a layer in the network and will make it possible for us to perform backpropagation. For the FCN-32 we will use bilinear upsampling kernel as an initialization, meaning that the network can learn a more suitable kernel during backpropagation.
To make the code below more easy to read, we will provide some statements that can be derived from the following article. The factor of upsampling is equal to the stride of transposed convolution. The kernel of the upsampling operation is determined by the identity: 2 * factor - factor % 2.
Below, we will define the bilinear interpolation using transposed convolution operation in Tensorflow. We will perform this operation on cpu, because later in the post we will need the same piece of code to perfom memory consuming operation that won’t fit into GPU. After performing the interpolation, we compare our results to the results that were obtained by the function from scikit-image.
from __future__ import division
import numpy as np
import tensorflow as tf
def get_kernel_size(factor):
"""
Find the kernel size given the desired factor of upsampling.
"""
return 2 * factor - factor % 2
def upsample_filt(size):
"""
Make a 2D bilinear kernel suitable for upsampling of the given (h, w) size.
"""
factor = (size + 1) // 2
if size % 2 == 1:
center = factor - 1
else:
center = factor - 0.5
og = np.ogrid[:size, :size]
return (1 - abs(og[0] - center) / factor) * \
(1 - abs(og[1] - center) / factor)
def bilinear_upsample_weights(factor, number_of_classes):
"""
Create weights matrix for transposed convolution with bilinear filter
initialization.
"""
filter_size = get_kernel_size(factor)
weights = np.zeros((filter_size,
filter_size,
number_of_classes,
number_of_classes), dtype=np.float32)
upsample_kernel = upsample_filt(filter_size)
for i in xrange(number_of_classes):
weights[:, :, i, i] = upsample_kernel
return weights
def upsample_tf(factor, input_img):
number_of_classes = input_img.shape[2]
new_height = input_img.shape[0] * factor
new_width = input_img.shape[1] * factor
expanded_img = np.expand_dims(input_img, axis=0)
with tf.Graph().as_default():
with tf.Session() as sess:
with tf.device("/cpu:0"):
upsample_filt_pl = tf.placeholder(tf.float32)
logits_pl = tf.placeholder(tf.float32)
upsample_filter_np = bilinear_upsample_weights(factor,
number_of_classes)
res = tf.nn.conv2d_transpose(logits_pl, upsample_filt_pl,
output_shape=[1, new_height, new_width, number_of_classes],
strides=[1, factor, factor, 1])
final_result = sess.run(res,
feed_dict={upsample_filt_pl: upsample_filter_np,
logits_pl: expanded_img})
return final_result.squeeze()
upsampled_img_tf = upsample_tf(factor=3, input_img=img)
io.imshow(upsampled_img_tf)
<matplotlib.image.AxesImage at 0x7fe4f81cae10>
# Test if the results of upsampling are the same
np.allclose(upsampled_img_skimage, upsampled_img_tf)
True
for factor in xrange(2, 10):
upsampled_img_skimage = upsample_skimage(factor=factor, input_img=img)
upsampled_img_tf = upsample_tf(factor=factor, input_img=img)
are_equal = np.allclose(upsampled_img_skimage, upsampled_img_tf)
print("Check for factor {}: {}".format(factor, are_equal))
Check for factor 2: True
Check for factor 3: True
Check for factor 4: True
Check for factor 5: True
Check for factor 6: True
Check for factor 7: True
Check for factor 8: True
Check for factor 9: True
Upsampled predictions
So let’s apply our upsampling to the actual predictions. We will take the VGG-16 model that we used in the previous post for classification and apply our upsampling to the downsampled predictions that we get from the network.
Before applying the code below I had to change a certain line in the definition of VGG-16 model to prevent it from reducing the size even more. To be more specific, I had to change the 7x7 convolutional layer padding to SAME option. This was done by the authors because they wanted to get single prediction for the input image of standart size. But in case of segmentation we don’t need this, because otherwise by upsampling by factor 32 we won’t get the image of the same size as the input. After making the aforementioned change, the issue was eliminated.
Be careful because the code below and specifically the upsampling variable consumes a huge amount of space (~15 Gb). This is due to the fact that we have huge filters 64 by 64 and 1000 classes. Moreover, we actually don’t use a lot of space of the upsampling variable, because we define only the diagonal submatrices, therefore, a lot of space is wasted. This is only done for demonstration purposes for 1000 classes and standart Segmentation datasets usually contain less classes (20 classes on PASCAL VOC).
%matplotlib inline
from matplotlib import pyplot as plt
import numpy as np
import os
import tensorflow as tf
import urllib2
from datasets import imagenet
from nets import vgg
from preprocessing import vgg_preprocessing
checkpoints_dir = '/home/dpakhom1/checkpoints'
slim = tf.contrib.slim
# Load the mean pixel values and the function
# that performs the subtraction
from preprocessing.vgg_preprocessing import (_mean_image_subtraction,
_R_MEAN, _G_MEAN, _B_MEAN)
slim = tf.contrib.slim
# Function to nicely print segmentation results with
# colorbar showing class names
def discrete_matshow(data, labels_names=[], title=""):
fig_size = [7, 6]
plt.rcParams["figure.figsize"] = fig_size
#get discrete colormap
cmap = plt.get_cmap('Paired', np.max(data)-np.min(data)+1)
# set limits .5 outside true range
mat = plt.matshow(data,
cmap=cmap,
vmin = np.min(data)-.5,
vmax = np.max(data)+.5)
#tell the colorbar to tick at integers
cax = plt.colorbar(mat,
ticks=np.arange(np.min(data),np.max(data)+1))
# The names to be printed aside the colorbar
if labels_names:
cax.ax.set_yticklabels(labels_names)
if title:
plt.suptitle(title, fontsize=15, fontweight='bold')
with tf.Graph().as_default():
url = ("https://upload.wikimedia.org/wikipedia/commons/d/d9/"
"First_Student_IC_school_bus_202076.jpg")
image_string = urllib2.urlopen(url).read()
image = tf.image.decode_jpeg(image_string, channels=3)
# Convert image to float32 before subtracting the
# mean pixel value
image_float = tf.to_float(image, name='ToFloat')
# Subtract the mean pixel value from each pixel
processed_image = _mean_image_subtraction(image_float,
[_R_MEAN, _G_MEAN, _B_MEAN])
input_image = tf.expand_dims(processed_image, 0)
with slim.arg_scope(vgg.vgg_arg_scope()):
# spatial_squeeze option enables to use network in a fully
# convolutional manner
logits, _ = vgg.vgg_16(input_image,
num_classes=1000,
is_training=False,
spatial_squeeze=False)
# For each pixel we get predictions for each class
# out of 1000. We need to pick the one with the highest
# probability. To be more precise, these are not probabilities,
# because we didn't apply softmax. But if we pick a class
# with the highest value it will be equivalent to picking
# the highest value after applying softmax
pred = tf.argmax(logits, dimension=3)
init_fn = slim.assign_from_checkpoint_fn(
os.path.join(checkpoints_dir, 'vgg_16.ckpt'),
slim.get_model_variables('vgg_16'))
with tf.Session() as sess:
init_fn(sess)
segmentation, np_image, np_logits = sess.run([pred, image, logits])
# Remove the first empty dimension
segmentation = np.squeeze(segmentation)
names = imagenet.create_readable_names_for_imagenet_labels()
# Let's get unique predicted classes (from 0 to 1000) and
# relable the original predictions so that classes are
# numerated starting from zero
unique_classes, relabeled_image = np.unique(segmentation,
return_inverse=True)
segmentation_size = segmentation.shape
relabeled_image = relabeled_image.reshape(segmentation_size)
labels_names = []
for index, current_class_number in enumerate(unique_classes):
labels_names.append(str(index) + ' ' + names[current_class_number+1])
# Show the downloaded image
plt.figure()
plt.imshow(np_image.astype(np.uint8))
plt.suptitle("Input Image", fontsize=14, fontweight='bold')
plt.axis('off')
plt.show()
discrete_matshow(data=relabeled_image, labels_names=labels_names, title="Segmentation")

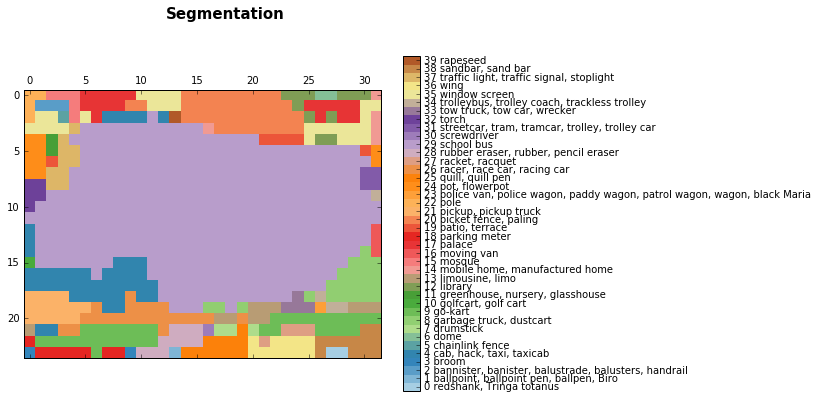
And now let’s upsample the predictions that we got for the image using the bilinear upsampling kernel.
upsampled_logits = upsample_tf(factor=32, input_img=np_logits.squeeze())
upsampled_predictions = upsampled_logits.squeeze().argmax(axis=2)
unique_classes, relabeled_image = np.unique(upsampled_predictions,
return_inverse=True)
relabeled_image = relabeled_image.reshape(upsampled_predictions.shape)
labels_names = []
for index, current_class_number in enumerate(unique_classes):
labels_names.append(str(index) + ' ' + names[current_class_number+1])
# Show the downloaded image
plt.figure()
plt.imshow(np_image.astype(np.uint8))
plt.suptitle("Input Image", fontsize=14, fontweight='bold')
plt.axis('off')
plt.show()
discrete_matshow(data=relabeled_image, labels_names=labels_names, title="Segmentation")

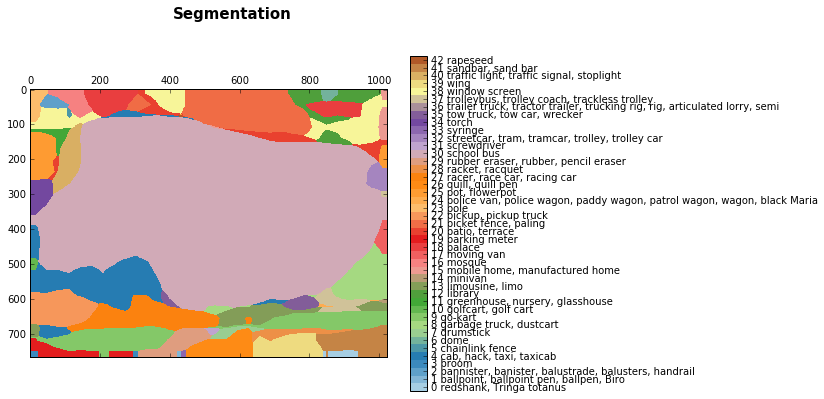
The ouput results that we got are quite noisy, but we got an approximate segmentation for the bus. To be more precise, it is not a segmentation but regions where the network was evaluated and gave the following predictions.
The next stage is to perform training of the whole system on a specific Segmentation dataset.
Conclusion and Discussion
In this post we covered the transposed convolution and specifically the implementation of bilinear interpolation using transposed convolution. We applied it to downsampled predictions to upsample them and get predictions for the whole input image.
We also saw that you might experience problems with space if you do segmentation for a huge number of classes. Because of that, we had to perform that operation on CPU.